




.png)
.png)
.png)



Pick & Place – En Üst Düzey
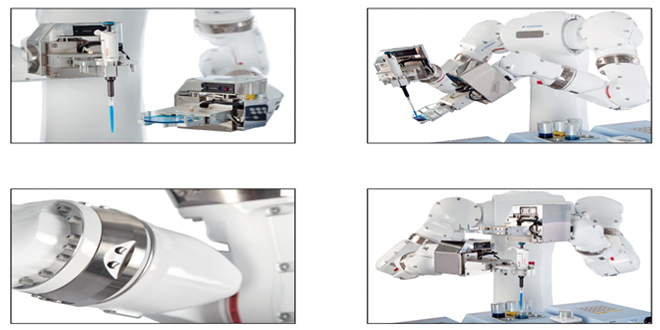
Bu ambalaj robotları, her şekil ve kıvamda ürünü nazikçe ve hızla alıp yerleştirmede ayrıca ambalaj malzemelerini işlemekte uzmanlaşmıştır. Örneğin F2 ve F3 robotları harika sonuçlar sunar: çeşitli ambalaj formatlarına uygun düz kartonları hassas şekilde katlayabilir, önceden gruplanmış ürünleri karton ya da plastik ambalajlara yerleştirip güvenle kapatabilirler.
Schubert bunun temelini 1981 yılında "Roby" olarak da bilinen ilk dört eksenli robot SNC-R1 ile attı: Gerhard Schubert, tek tek ürünleri tepsilere veya kutulara yerleştirerek paketlemek için bu makineyi tasarladı. 1984’te model, ilk kez bir çikolata paketleme hattını otomatikleştirdi ve aynı yıl önemli bir gelişmenin de önünü açtı. SNC-F2 ile bu teknoloji, ürünleri kutulara yerleştirip kapatma sürecini tek bir robot ve uygun araçlarla mümkün kılarak dünya genelinde binlerce kurulumda kullanılan başarılı bir otomasyon serüvenini başlattı.
F robotları, SCARA prensibine dayanır. Bu kısaltma, ‘Selective Compliance Assembly Robot Arm’ ifadesinin baş harflerinden oluşur ve basitçe ‘tek kollu’ robotları ifade eder. Bu robotların özel kol geometrisi, dikey yönde yüksek sertlik sağlarken yatay düzlemde esnek kalmalarını sağlar. Bu da onları dar alanlarda kullanışlı kılar ve geniş konveyör bantları için büyük bir hareket yarıçapı sunar.
Alan gereksinimi konusuna değinmişken delta robot tipi baz alınarak geliştirilen T3/T4 ve T5 robotları da son derece kompakt yapılara sahiptir. Becerikli mühendisler tarafından bu robot, 1980’li yıllarda École Polytechnique Fédérale de Lausanne'da (EPFL) geliştirildi. Klasik delta robotlarında çerçevenin üst kısmına bağlı ve motora entegre en az üç paralel kol bulunur; kolların alt ucunda tutucular yer alır. Kolların üçgen yerleşimi, Yunanca delta (Δ) harfini andırdığı için bu robotlar bu isimle anılır.
Transmodul ile Kesintisiz Verimlilik
Ambalaj hatları bu kadar güvenilir şekilde çalışabiliyorsa bunun nedeni boş kutuların kurulması, yapıştırılması ve kapatılması gibi farklı adımlar için robotları birbirine bağlayan basit bir yapının bulunmasıdır; ki bu yapı, önceki çözümlerle çok az benzerlik taşır. Bu yapı olmadan tüm süreç durma noktasına gelir. Sonuçta dolu tepsiler veya diğer ambalaj malzemeleri ilgili sistemlere taşınmalıdır.
Burada akla gelen şey konveyör bantlar olabilir fakat bu yanlış olur. Özellikle dünya genelindeki kartonlama ve çoklu paketleme hatlarında sistem bileşenleri arasında ileri geri hareket eden kompakt bir platform bulunur. Taşıdığı yük; kurulu karton tabanlar, metal kutular, tek tek paketlenmiş ürünler veya hazır ikincil ambalajlar olabilir. Elbette burada bahsedilen Crailsheim’dan çıkan bir diğer inovasyon olan Transmodul’dür.
Transmodul taşıma robotu, 2009 yılından bu yana ambalaj hatlarında başarılı ve kesintisiz bir yolculuk sürdürmektedir. Bu robot yalnızca farklı kutu formatlarını değil aynı zamanda teneke kutular veya plastik kasalar gibi çeşitli ambalaj türlerini işleyen hatlarda kullanılır. Bu da yüksek düzeyde esneklik gerektirir ve son derece çevik Transmodul bu esnekliği sağlar. Vakum üfleyici, ambalaj malzemelerini veya ürünleri güvenle yerinde tutar. Bu güvenlik büyük ölçüde taşıma yüzeyindeki ürünlere özel format plakaları sayesinde sağlanır. Yeni bir ambalaj formatına geçmek gerektiğinde yalnızca bu format plakasının değiştirilmesi yeterlidir.
Transmodul, aynı zamanda geleneksel taşıma zincirlerinde bulunmayan bir proses güvenilirliği avantajı da sunmaktadır: Bir Transmodul arızalandığında hızlı bir şekilde başka bir üniteyle değiştirilebilir ya da hat, bir Transmodul eksik olsa dahi paketleme işlemine kesintisiz olarak devam edebilir. Süreç hiçbir aşamada tamamen durmaz. Hattın sonuna ulaşıldığında ise dikkat çekici bir mekanizma devreye girer: Boşaltılan Transmodul’lar yana doğru eğilerek rayın alt kısmından başlangıç noktasına geri döner. Bu sayede sürekli ve kesintisiz bir döngü sağlanır.
Elbette hat içinde çok daha fazla işlem gerçekleşir. Ancak dışarıya da göz atmakta fayda var. Robotlar, hat öncesi görevleri üstlenebilir ve hafif ürünleri Pick & Place yöntemiyle taşıyabilirler. Cobot’lar genellikle insanlarla yakın mesafede çalışır. Hızlarına ve hareket menzillerine bağlı olarak güvenlik hücreleri içine yerleştirilirler, böylece insan ve makine birbirine müdahale edemez.
Cobotu benzersiz kılan şey, son teknoloji robotik ile yapay zeka destekli görüntü işleme teknolojisini bir araya getirmesidir. Önceden görsellerle ‘eğitilen’ bu görüntüleme sistemi, Schubert’in tog.519 gibi cobotlarının dağınık yığınlar içindeki tekil ürünleri hızla bulmasını, almasını ve başka bir konuma taşımasını mümkün kılar. Akıllı görüntü tanıma sayesinde tog.519, daha önce hiç görmediği ürünleri dahi alabilir. Tamamen otonom bir sistem olan mobil cobot, neredeyse her yerde konumlandırılabilir: Bir makinenin önünde ya da arkasında, bağımsız bir robot hattı olarak ya da iki istasyon arasında otomasyon sağlayıcı olarak.
Bir cobot, F4 ya da T4 robotu, ürünleri nazikçe işleyemedikçe tam anlamıyla etkileyici olamaz. Pick & place robotları gibi tüm ürün taşıyıcı robotlar bu amaçla özel uç efektörlerle (end effector) donatılmıştır. Ürüne özel tasarlanmış tutucu veya emici araçlar ambalaj robotlarında kullanılır. Tutucu araçlar mekanik parmaklar veya çenelerle nesneleri yerinde tutar. Doğrudan fiziksel temas, ağır ya da düzensiz şekilli ürünlerin dahi yüzeyden bağımsız olarak güvenle taşınmasını sağlar. Ancak bu araçların dezavantajı hassas ürünlere zarar verebilme riskidir.
Bu nedenle, özellikle unlu mamuller gibi hassas ürünler genellikle robotlar tarafından vakumlu taşıma sistemleriyle işlenir. Bu araçlar kontrollü bir vakum oluşturarak hafif ve pürüzsüz, hava geçirmez yüzeyli ürünlerin yüzeye yapışmasını sağlar. Schubert, vakum sistemindeki akış hızını sürekli izleyen sensörler kullanır. Bu sayede vakum araçlarının ürünü taşıyıp taşımadığını tespit edebilir. Bu da hassas ve eksiksiz üretim için önemli bir ön koşuldur. Ürünler bir kez vakumlandığında ya da tutulduğunda boşluklar veya parçalar yalnızca robotların sağlayabileceği yumuşaklıkla işlenmeye devam edebilir.
------------------------------------------------------------------------------------------------
Sees, Grasps, Places – Intelligent Packaging with Schubert Robots
Many notions exist about robots, but very few of them correspond to today’s industrial reality. This is especially true when it comes to consumer goods: anyone looking for humanoid robots with two legs, two arms and a rudimentary face is in for a disappointment. Yet manufacturers are teeming with robots. Integrated into packaging lines, they perform more tasks than any human could ever manage. Some lines are veritable armies of highly versatile machines. Reason enough to take a closer look.
First things first: you don’t have to look very far to find robots. They do their jobs wherever high quality, flexibility and gentle processes are required. This is the case virtually everywhere in the food, confectionery and cosmetics industries. Tasks such as grouping, transporting, erecting and sealing are performed by all types of agile engineering solutions that can recognise, grip, place or transport products – both on and off packaging lines. They all look very different and perform their work in different locations.
Take biscuit production, for example: once baked, crispy cookies or biscuits leave the oven, wide conveyor belts most often take them straight to the packaging process, where they quickly encounter their first special type of machine. Biscuits are rarely packaged as loose goods in bags; the market is dominated by packaging that combines trays and flowpacks. So how do biscuits end up in the tray? It’s quite simple: a robot – usually a so-called F4 or T4 – picks up each biscuit individually and places it precisely into a tray cavity, usually working in a ‘team’ with other robots of the same type.
Pick & place – the premier league
These packaging robots specialise in the gentle, fast picking and placing of products of any shape or consistency, as well as the processing of packaging materials. F2 and F3 robots, for example, achieve great results: they can precisely erect flat blanks for a wide variety of packaging formats, place pre-grouped products into cardboard or plastic packaging and close them securely.
Schubert laid the foundation for all these developments back in 1981 with the first four-axis robot, the SNC-R1, also known as ‘Roby’: Gerhard Schubert designed the machine for packaging individual products into trays or boxes. In 1984, the model automated a chocolate packing line for the very first time, paving the way for further developments, one of which set new standards in the same year. The SNC-F2 marked the beginning of the successful automation journey for a technology that has been used in thousands of installations worldwide to successfully package products in the most varied sectors. This advance made it possible to erect, fill and seal cartons with a single robot and the corresponding tools.
F robots are based on the SCARA principle. The acronym stands for ‘Selective Compliance Assembly Robot Arm’ and, put simply, refers to ‘one-armed’ robots. Their special arm geometry gives them high rigidity in the vertical direction, while allowing them to remain flexible in the horizontal plane. As a result, they require little space and have a large radius of action, which is especially advantageous for wide conveyor belts.
On the subject of space requirements, T3/T4 and T5 robots, which are based on the delta robot type, are also extremely compact. Resourceful engineers developed this technology in the 1980s at the École Polytechnique Fédérale de Lausanne (EPFL). Classic delta robots have at least three parallel arms that are attached to the top of the frame and connected to a motor; grippers are located at the lower end of the arms. The triangular arrangement of the arms resembles the Greek letter delta (Δ), which is how the robot type got its name.
Seamless efficiency with the Transmodul
Packaging lines can run this reliably because there’s a simple structure that links robots for different steps – such as setting up blanks, gluing and sealing – and which has very little in common with previous solutions. Without it, the entire process would come to a standstill. After all, filled trays or other packaging materials have to be transported to the respective systems.
Anyone thinking of conveyor belts here is mistaken. Especially in cartoning and multipack lines around the world, a compact platform travels back and forth on a track between the system components. Its cargo may include erected carton bases, metal cans, individually packaged products or ready-made secondary packaging – in short, anything that needs to be moved within the line. Of course, we’re talking about the Transmodul, another innovation from Crailsheim.
The Transmodul transport robot has been travelling along a successful, continuous journey in packaging lines since 2009. It is used in lines that handle multiple packaging formats – i.e. not only different box formats, but also tin cans or plastic crates, for example. This requires flexibility, which the extremely agile Transmodul delivers. A vacuum blower holds packaging materials or products securely in place. This is ensured in no small part thanks to product-specific format plates on the transport surface. To set up a new packaging format, you simply need to change the format plate.
When it comes to process reliability, the Transmodul has an ace up its sleeve that classic transport chains lack: if a Transmodul fails, it can be quickly replaced by another one – or the line can continue packing with one less Transmodul. It never comes to a standstill. When they reach the end of their route, something fascinating happens: unloaded Transmoduls tilt sideways and travel back to the starting point on the underside of the track – creating a continuous cycle.
Beyond the line itself
Of course, there is much more going on within the line. But it is also worth taking a look outwards. Robots can take on upstream tasks and transport lightweight products via pick & place, for example. Cobots – short for collaborative robots – often work in close proximity to humans. Depending on their speed and range of motion, they are located within a safety cell so that humans and machines cannot interfere with each other.
What makes the cobot so unique is that it combines state-of-the-art robot technology with AI-supported image processing. The vision system, which is ‘trained’ in advance with images, enables cobots such as Schubert’s tog.519 to quickly find individual products, even in unsorted piles, pick them up and move them to a different location. Thanks to intelligent image recognition, the tog.519 can even pick up products that it sees for the first time. As an entirely autonomous system, the mobile cobot can be positioned virtually anywhere – in front of or behind a machine, as a stand-alone robot line or as automation between two stations.
Gentle gripping
A cobot, an F4 or a T4 would only be half as impressive if they didn’t also work gently. Like all robots that pick up and place products, they have so-called end effectors specifically for this purpose. Gripping or suction tools tailored to the product are suitable for packaging robots. Gripping tools hold objects in place with mechanical fingers or jaws. Direct physical contact allows them to hold even heavy or irregularly shaped products securely – regardless of their surface. The disadvantage is that they can damage sensitive products.
This is why baked goods, for example, are usually picked up by robots using suction tools. These tools create a controlled vacuum that causes lightweight products with smooth, air-impermeable surfaces to adhere to the tools. Schubert uses sensors to continuously monitor the flow rate in the vacuum system. This allows them to determine whether or not the suction tools are holding the products – an important prerequisite for precise, complete production. Once suctioned or gripped, products, blanks or parts can be processed further – as gently as only a robot can.











0 YORUM